

こんにちは!とのさまラボです!
先週は、デザイナーの吉野さんに新とのさまロボのラフデザインを書いてもらいました!
※こんな感じ!
今週は、DMM.AKIBAにいってきました!ペンギンのロボットとか世界にまだないGROOVE Xのロボットを生み出しているすごい場所です!
ベースとなるイサマロを片手に行ってきました!
ろぼとまさん登場!

※岡田さん(写真取るの忘れたから昔の写真)
まずは、部屋に入った途端衝撃のヒトコトが!
「イサマロ全部分解しましょう」(岡田)
まじで!これ分解するの!?
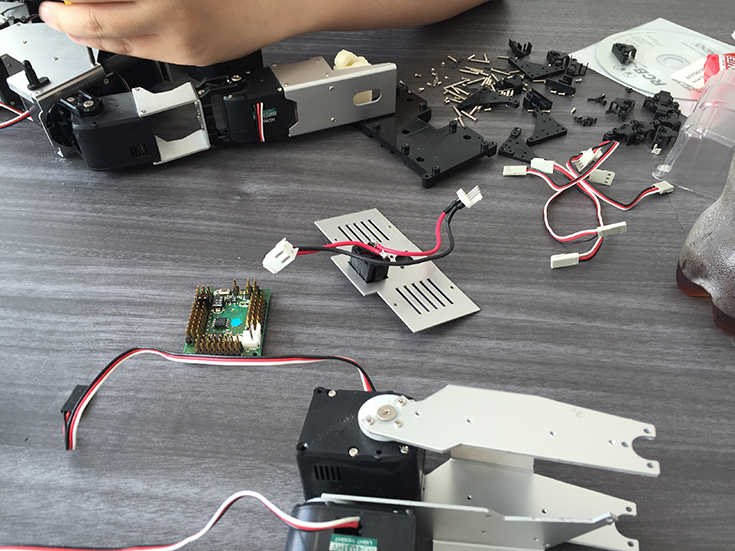
※1個1個ネジを外します
※ネジは、モーター1個に4個くらいついてます

※つらい・・・
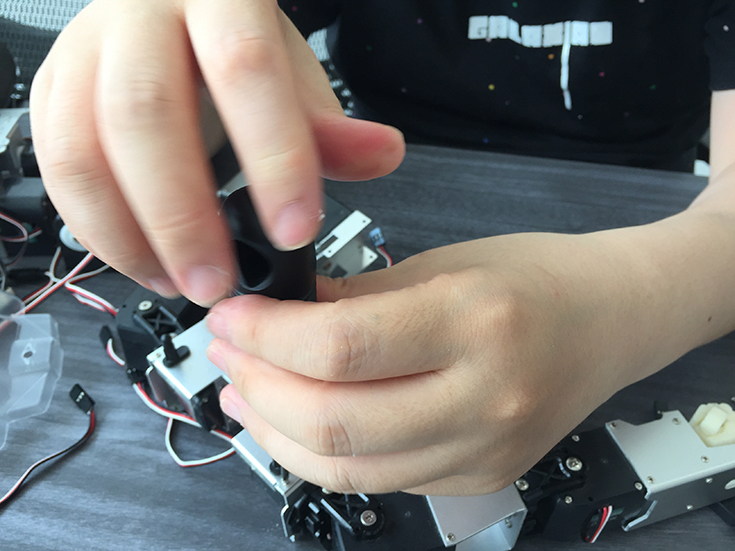
※がんばってネジを外します
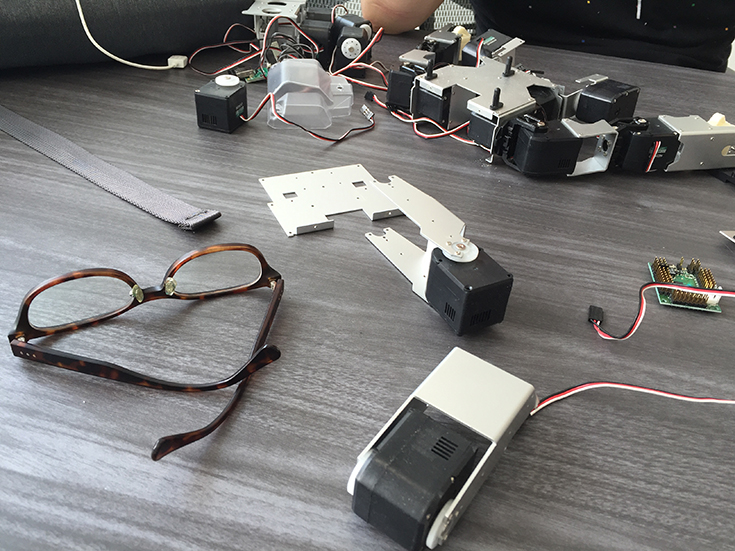
※みえづらいのでメガネもはずします(おじさん)
※からだのネジとかもはずします
※これ全部外すのか・・・

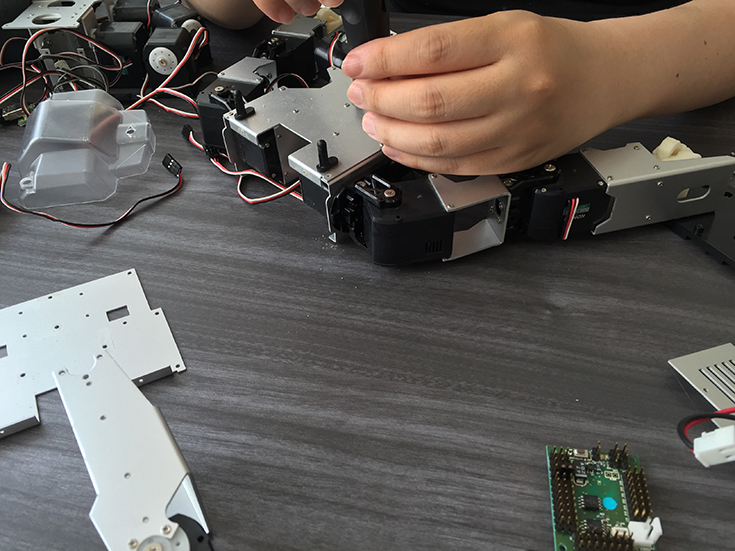
※いい感じになってきた!
※とはいえまだまだ・・・
と、こんな感じでネジを頑張って外しました!
なぜ全部外すのか
なんでわざわざネジを全部外すのでしょうか・・・
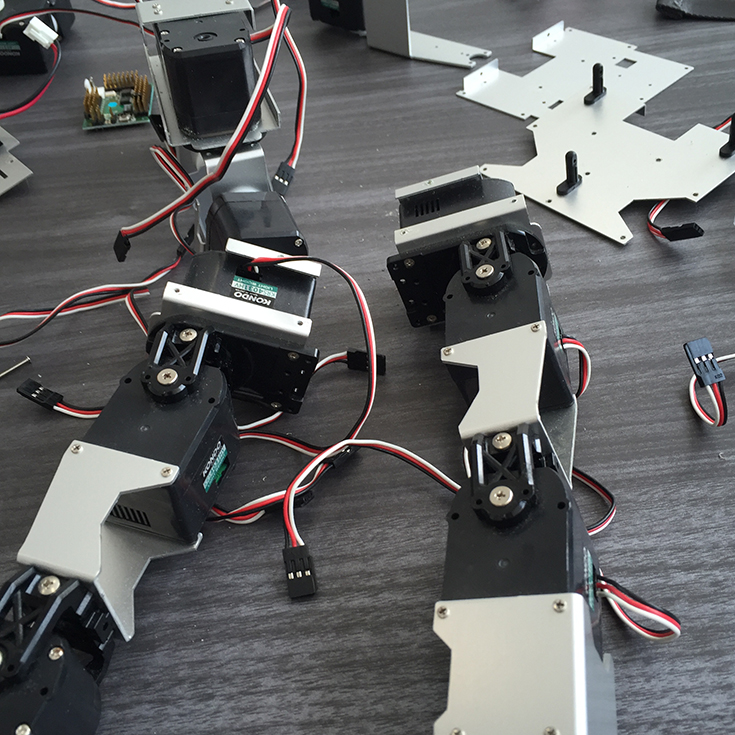
その秘密はモーターと基盤のつなぎ方にありました!

※わかるかな?
現在のモーターのつなぎ方は
[基盤]–[モーターA]–[モーターB]–[モーターC]
みたいな感じで、モーター同士がつながっていて基盤からの信号を送っているとのこと
これだと、配線は楽なのですが、モーターCに信号が行くまでに、経路が長いのでロスが起きる!
なので、これを全部外して基盤に直接全部つなぐようにするとのこと!
なるほど・・・
そんな微妙なロスとかどうでもよくない?
と、おもったけど、なんか直接繋いだほうが強そうなので
もくもく作業しました!
来週に続きます!